
Learning Resources
Lesson
Functional components of Sonar
Sonar stands for SOund Navigation And Ranging. A sonar system sends a burst of high frequency sound waves. Then it listens for an echo. The sound burst is sent and received through a transducer. The transducer converts the short burst of electrical energy into a burst of sound waves and acts like a loudspeaker to send out the sound burst. Then it changes its operation into a microphone mode to listen for the returning echoes, and converts any sound wave echoes back into electrical energy. The weaker echoes are then amplified and processed by the system to produce useable information such as distance and direction. Sonar also measures Doppler shift information.
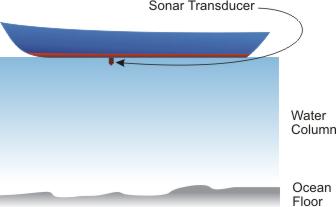
The basic Sonar configuration on a boat is as shown below
- Typical set up with sonar transducer on the bottom of the boat, below the waterline.
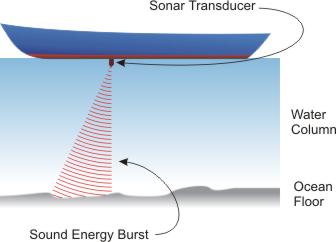
- The transducer, in 'loudspeaker' mode, sends a burst of sound energy
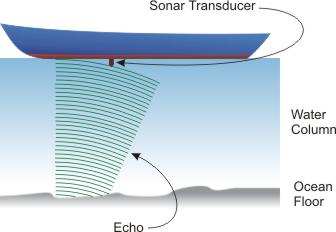
- Although the sound energy weakens with distance traveled, a properly designed system will produce an echo from obstacles, including the bottom. In receiver mode, the transducer acts as a microphone.
If it is used to measure water depth, as in the example, the system measures the time taken for the sound burst to travel to the bottom and return. Sound travels in water at approximately 1520 meters per second. The distance to the bottom is given by the formula

- d is distance
- S is speed
- t is time (it takes half of the time to go down and half to return)
If you know the time, calculating the distance is straightforward. Finding the distance frequently, as the boat moves forward, makes it possible for example to draw an outline of the bottom.
All sonar operates on this principle. The system can be used to measure distance to an object and the direction to that object. Sonar is used to map the ocean bottom, to track underwater obstructions to navigation, and to find fish. Submarines use it to track surface vessels and surface vessels use it to track submarines.
Sonar can be active
-
it sends a pulse
-
it listens for echoes
Sonar can be passive
-
it only listens for signals from other sources
Bats use a form of sonar called echolocation to navigate and catch insects. Early autofocus systems on cameras used a form of sonar. Today's cameras use a form of radar based on infrared light. Ultrasound is also a commonly used form of sonar.
Activity
Assigned activities
Develop a presentation on
- how sonar finds fish
The following are good starting places for research
- http://www.marinescenemall.com/customerservice/cs-knowledge_sonar.htm
- http://www.insidesportfishing.com/encyclopedia/Articles/1825.asp
- http://www.lei-extras.com/tips/sonartut/Default.asp
- The History of Sonar - Inventors
Test Yourself
There is no self test for this lesson.